

















































































































Q&A with the Tandon Student Behind the Facially Cognizant Robot
Current Tandon doctoral student, Jared Frank, will soon be known internationally after his participation in the French-American Doctoral Exchange Seminar, FADEx, for his work on a socially interactive robot.
April 28, 2016
Jared Frank is best known at NYU for his work on a socially interactive robot. However, the Tandon doctoral student will soon be known internationally when he heads to the French-American Doctoral Exchange Seminar, FADEx, this coming July. Frank was selected as one of only 10 American students to attend this conference, held annually in France. Along with displaying his work, he will also take part in the seminar’s discussion of this year’s theme: cyber-physical systems.
WSN sat down with Frank to discuss the upcoming conference and the work he’s achieved thus far.
WSN: Could you describe the FADEx program?
Jared Frank: The FADEx program was created by the Office for Science and Technology of the Embassy of France in the United States to encourage scientific collaboration between American and French Ph.D. students. The program provides American and French students the opportunity to communicate their research and experiences at a one-week seminar in France.
WSN: Do you have any specific goals going to France for this program?
JF: One very important goal for this program is for the presentations, including the one of my research, to spark some interesting discussions about cyber-physical systems. I’m hoping that I’ll be able to bring back some useful insights from the program that will further the work that my colleagues and I are doing in the Mechatronics and Controls Laboratory at NYU Tandon.
WSN: Could you tell me a bit more about your robot? What does it do? How did you get the idea?
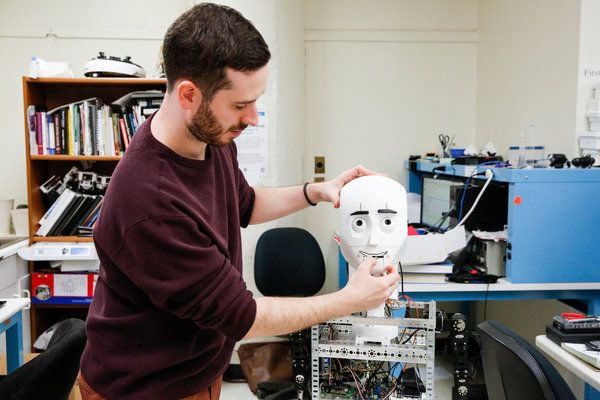
JF: CAESAR, the Cellular-Accessible, Expressive, Semi-Autonomous Robot, is a humanoid robot that we’ve been developing at the Mechatronics and Controls Lab for the past three years. CAESAR is capable of interacting with people in two main ways: socially and through highly intuitive and visual mobile interfaces that we’ve designed for smartphones and tablets. During social interaction, CAESAR can detect people’s faces, recognize who people are that interact with him, as well as what their facial features (eyebrows, lips, etc) are doing in order to mimic facial expressions. By copying people’s faces, CAESAR can learn how to express emotions by directly observing how people express them. This allows people who need to work with CAESAR in a university, an office, a rehabilitation center to train CAESAR without needing to be expert roboticists or programmers.
WSN: How does your work speak to this year’s theme of FADEx?
JF: Basically, the systems I am creating are a good fit for the cyber-physical systems theme of this program since they contain a blend of cyber elements — touchscreen, virtual and augmented reality, wireless communication — and physical elements — machines like robots that can move, rotate and affect their environment — that the user interacts with. I hope that the other attendees are impressed with the work that I present, and that the feedback I receive in France goes towards advancing the work that I’ve conducted in robotics and in augmented reality interfaces so far.
Email Brooke Jensen at [email protected].